

ROBONOMICS n’est pas seulement un projet, c’est plus que cela: c’est d’abord une vision.
Ce projet veut nous emmener vers un monde décrit dans les romans de science-fiction où hommes et machines sont liés et reliés.
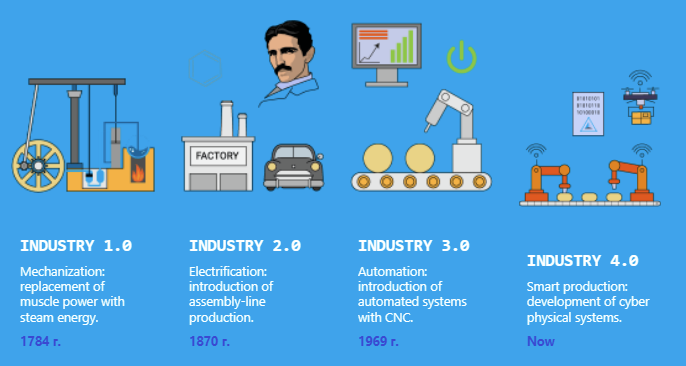
Robonomics essaie de lancer la nouvelle révolution industrielle, celle du 21ème siècle: l’INDUSTRIE 4.0.
QU’EST-CE QUE ROBONOMICS ?
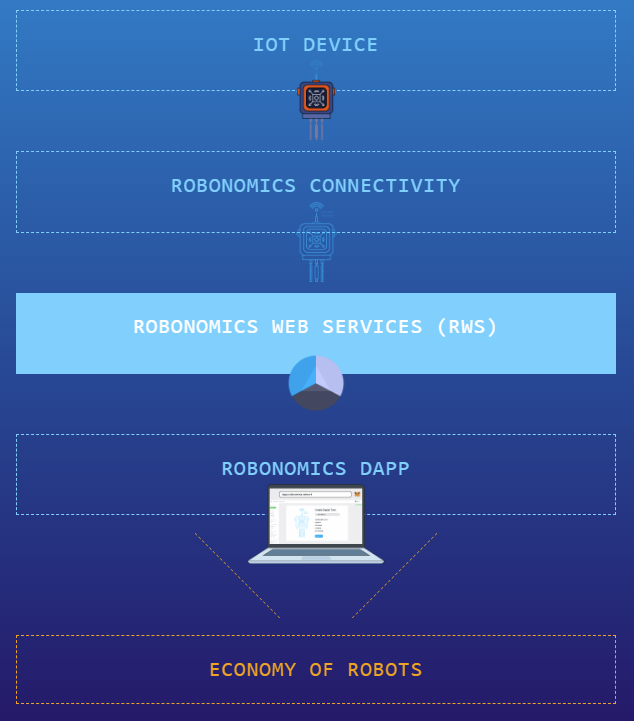
Robonomics est une plateforme open-source pour les applications IoT (« Internet of Things » ou « Internet des Objets » en français). Robonomics soutient une nouvelle génération de technologies Internet (web3) qui met en œuvre l’échange d’informations techniques et économiques sous la forme de transactions atomiques entre les applications des utilisateurs, les services IoT et la robotique complexe.

Robonomics contient un ensemble complet d’outils pour développer des applications IoT, tant du côté de la robotique que de l’interface utilisateur. La communication entre l’utilisateur et le dispositif s’effectue à l’aide des technologies les plus performantes du monde Web3 – IPFS, Ethereum et Polkadot. Ainsi, les développeurs peuvent créer des applications modernes et sécurisées pour les villes intelligentes et l’industrie 4.0.
Robonomics Web Services (RWS) fournira une infrastructure décentralisée pour les solutions IoT.
L’EQUIPE
L’équipe est principalement basée à St-Pétersbourg en Russie. Parmi les principaux intervenants du projet on peut dégager notamment:
Serguei LONSHAKOV
Il est dans le monde crypto depuis 2010, s’occupe du projet Airalab depuis 2015 et de Robonomics depuis 2017.
Il est ingénieur de formation.
https://www.linkedin.com/in/ensrationis/?originalSubdomain=ru
Vitaly BULATOV

CEO de la société MerkleBot qui est une plateforme d’automatisation robotique. Chez Robonomics il est “évangéliste”, il prêche la bonne parole robotique dans le milieu industriel.
https://www.linkedin.com/in/vitl2907/
Aleksandr KRUPENKIN

Ingénieur R&D chez Astar Network et architecte chez Airalab.
https://www.linkedin.com/in/krupenkin/
Anastasiia BAKAI

Dev Front-end et web-designer.
https://www.linkedin.com/in/bakai-anastasiia/
Alisher KHASSANOV

Ingénieur robotique.
https://www.linkedin.com/in/khssnv/
LA VISION DERRIÈRE ROBONOMICS
Robonomics permet aux utilisateurs de se connecter à des appareils intelligents en utilisant des applications décentralisées (dApp) qui ne nécessitent pas le transfert des données de l’utilisateur pour l’authentification. La communication s’effectue via un réseau décentralisé de fournisseurs sans point de défaillance unique, et où l’appareil obtient indépendamment des informations du réseau blockchain pour s’exécuter ou transmettre des données à distance. Ainsi, Robonomics fournit un haut niveau de cybersécurité du dispositif et de confidentialité des données de l’utilisateur à toutes les étapes de la communication, de la demande de l’utilisateur au lancement du dispositif intelligent.
DES CONTRATS INTELLIGENTS À LA PLATEFORME IOT CROSS-CHAIN
Le projet Robonomics a plus de 6 ans. Il commencé à préparer la première expérience démontrant la communication homme-machine à l’aide d’un réseau de fournisseurs décentralisés indépendants en 2015 (Drone employee: field testing with Ethereum blockchain transaction march’2016), dès les premiers jours du réseau Ethereum. Au début de l’année 2021, l’équipe du projet a réussi à créer un protocole de communication machine technico-économique fonctionnant au-dessus d’Ethereum et d’IPFS, et à le compléter avec des éléments d’une plateforme IoT cloud basée sur la parachain Polkadot.
Par conséquent, aujourd’hui, il dispose déjà d’une plateforme hybride pour créer des applications IoT futuristes qui permettent d’interagir avec des appareils sous le contrôle d’un ordinateur décentralisé mondial.
À LA FRONTIÈRE DE LA CYBERNÉTIQUE ET DE L’ÉCONOMIE
Les créateurs de Robonomics sont des expérimentateurs, des ingénieurs et des scientifiques soucieux de comprendre la validité scientifique de l’approche et d’atteindre la clarté dans la présentation des principes qui doivent constituer la base de toute l’architecture de la solution logicielle.
Dans ses articles entre 2017 et 2020, le projet présenté à la communauté scientifique de nombreux concepts et solutions réunis autour de l’idée de l’économie robotique, un système économique dans lequel les dispositifs robotiques agissent comme des agents indépendants capables de réaliser des activités économiques clés, auparavant réservées aux humains. Vous pouvez lire les articles scientifiques ici: https://robonomics.network/papers
Robonomics souhaite justifier l’émergence de l’économie robotique et expliquer en termes généraux pourquoi ce concept est la réponse inévitable et évidente au fonctionnement des systèmes robotiques à grande échelle de la nouvelle révolution industrielle.

NOTRE FUTUR DANS LES VILLES INTELLIGENTES
La tâche à laquelle les fabricants d’automates sont confrontés aujourd’hui porte un nom spécifique : la construction de systèmes cyber-physiques (abrégé en CPS). Par définition, un CPS est une forte unification et intégration mutuelle de multiples processus informatiques, réseautiques et physiques.
Les tâches de construction des CPS sont centrales à toutes idées décrites dans la nouvelle (quatrième) révolution industrielle. Par conséquent, les CPS sont la pierre angulaire de notre vie future dans les villes intelligentes et se manifestent partout. Voici quelques exemples de systèmes cyber-physiques du futur : Le pilote automatique d’Uber, les selfies par drone, le réseau d’imprimantes 3D dans les stations de métro.
Le CPS est une structure complexe composée de nombreux éléments connectés : de l’application sur le téléphone, il s’étend au contrôle du drone en vol au-dessus de la ville, puis procède à la publication des photos obtenues sur Instagram, mais seulement après traitement par l’IA du cloud.
Le plus important dans le processus de conception des CPS est de trouver la ligne fine entre un nombre suffisant et excessif d’éléments automatisés dans la chaîne d’approvisionnement des utilisateurs de services. En d’autres termes, où se situe la limite de taille du CPS ? Pour répondre à cette question, nous devons nous tourner vers le célèbre mathématicien Norbert Wiener.
En 1948, Norbert Wiener, professeur de mathématiques au MIT, a publié l’un des ouvrages les plus fondamentaux : « Cybernétique : Or Control and Communication in the Animal and the Machine ». Il a utilisé pour la première fois le terme « cybernétique », qui désigne des mécanismes d’autorégulation, et cette publication est donc considérée comme un anniversaire cybernétique reconnu.
Norbert Wiener parle de la viabilité de l’approche scientifique interdisciplinaire. Par exemple, il a établi un parallèle entre les systèmes de contrôle automatisés et les défis de la mise à l’échelle et de la complexité croissante de la société humaine.
En d’autres termes, l’approche cybernétique peut être appliquée aussi bien à la psychothérapie qu’à la biologie et à la navigation automatisée. Elle est basée sur la fonction du système, sur la manière dont les actions individuelles sont contrôlées et sur la manière dont les nœuds individuels interagissent les uns avec les autres.
En tenant compte des publications de Ronald Coase et de Norbert Wiener, dans le prolongement du développement de l’industrie 4.0, nous pouvons envisager d’utiliser le CPS comme un agent économique, tout en concevant des services robotisés. Pour réguler la taille du CPS et s’adapter à l’évolution des besoins des individus, nous pouvons utiliser les mécanismes du marché.
Et ce qui est scientifiquement intéressant, en prenant comme base l’idée des restrictions imposées par le marché sur la taille de l’entreprise, nous pouvons dire que la limite de l’augmentation des CPS sera toujours déterminée par le marché et rien d’autre n’est requis pour cela.
Les robo-entreprises sont une représentation idéale des systèmes cyber-physiques. Ils constituent une unité assez autonome capable de fournir des services aux humains et à d’autres robots contre de l’argent. Par conséquent, l’économie des robots nous apparaît comme un ensemble général de CPS qui fournissent des services et des biens directement au marché.
Dans le monde des robo-entreprises, il s’avère naturel de donner aux robots l’accès à des institutions sociales qui, auparavant, n’étaient nécessaires qu’aux humains.
Les institutions sociales n’apparaissent pas parce que nous sommes des personnes et que, physiologiquement, une personne ne peut pas vivre sans banques, contrats et autres instruments de la société. Mais seulement parce qu’une personne, à un moment donné, s’est engagée sur la voie de relations plus complexes dans la société et a fait un pas important vers l’accélération des processus de ceux qui nous entourent.
L’argent et les contrats devraient devenir accessibles aux robots, non pas parce qu’il s’agit d’un fantasme malsain de fans de robots qui ont oublié ce qu’est Skynet. Mais uniquement parce que la nouvelle révolution industrielle se donne pour mission de construire des chaînes automatisées complexes, dont les processus affecteront l’échange d’informations tant techniques qu’économiques, et se dérouleront également à une vitesse inaccessible aux humains.

L’un des exemples de nos expériences : la négociation des paiements pour l’espace routier et le droit de passage des véhicules autonomes afin de réduire la congestion. Ce qu’une personne ne ferait absolument pas dans le trafic, la voiture le fera pour vous sans difficultés : vous voulez changer de voie, votre voiture et celle de votre voisin échangent des offres sur le coût d’une telle opération à un rythme de centaines de messages par seconde, elles révèlent un prix d’équilibre, et ainsi vous êtes déjà dans la prochaine voie plus rapide. Cela signifie qu’il sera désormais possible de « charger » votre trajet avec uber et de le rendre plus rapide.
Les robots ont besoin d’argent qui sera directement à leur disposition afin de pouvoir effectuer des opérations sans personne à la vitesse à laquelle seules les machines peuvent prendre des décisions. Et tout cela uniquement pour qu’une personne puisse profiter de la vie dans la ville intelligente !
Et voilà que nous arrivons en douceur à la première monnaie électronique – le bitcoin. Le fait que le bitcoin puisse être stocké sur votre compte selon le principe non pas d’une banque, mais de l’argent liquide dans votre portefeuille en fait la première monnaie que le robot peut gérer de manière indépendante, plus précisément de manière autonome. En même temps, on peut déjà dire aujourd’hui que le bitcoin n’est pas seulement de l’argent électronique, mais une véritable institution financière mondiale.
Par conséquent, un événement que nous n’avons pas inventé, mais qui relève clairement de notre vision, fait du bitcoin la première monnaie pour les robots, ou, si nous regardons encore plus profondément, c’est précisément cette institution sociale qui aidera à la formation de sociétés robotiques.

CONTRATS INTELLIGENTS ETHEREUM
Le bitcoin est devenu la première monnaie accessible aux robots. En attendant, nous ne pouvons pas parler du bitcoin sous sa forme actuelle comme d’un outil d’échange technique et économique à part entière.
Aujourd’hui, nous disposons déjà de contrats intelligents, de marchés DeFi et d’une infrastructure décentralisée pour l’échange de messages entre robots qui ouvrent à l’humanité la possibilité de créer une partie entièrement automatisée de l’économie humaine – l’économie robotique.
L’une des grandes opportunités pour construire l’économie des robots est la technologie Ethereum. Grâce à la fonctionnalité Ethereum, les robots peuvent non seulement échanger de l’argent, mais aussi conclure des contrats avec les humains et entre eux.
Mais quel est l’intérêt de la communication par contrat de machine à machine (m2m) ? C’est une excellente question ! Revenons à la CPS. Lorsque nous parlons de communications directes entre des capteurs, des équipements mécaniques ou tout autre élément, nous parlons toujours de collaboration au sein d’un système réglementé. Mais si nous voulons que les services des villes intelligentes soient vivants (ou même la maison intelligente dans certains cas), nous devons établir une communication avec divers éléments tiers.
Imaginons un service de livraison par drone. Si un drone, par exemple, est la propriété de DHL, comment peut-il accéder aux entrepôts d’Amazon ou à l’ensemble de l’espace aérien de la ville ? S’agit-il d’un monopole ? C’est un défi majeur pour de nombreuses initiatives de la 4e révolution industrielle !
La plupart des entreprises disent qu’elles ont besoin de droits presque complets sur leur environnement parce qu’elles ne savent pas comment mettre en place de manière sécurisée l’échange d’informations techniques entre des systèmes automatisés en dehors de leur propre structure interne. Dans le même temps, si l’on examine les processus dans lesquels une personne travaille, on constate que la coopération de différentes sociétés existe depuis longtemps et avec succès. Vous pouvez facilement commander la livraison à domicile des marchandises achetées sur le site web d’Amazon, et le coursier pourra conduire une voiture sur les routes de la ville, recevoir une commande à l’entrepôt et vous l’apporter.
Quelle est la différence ? Dans le premier cas, il n’y a aucun moyen de construire une relation contractuelle entre des machines, et dans le second cas, dans le monde des personnes, les relations contractuelles existent déjà.
PARACHAINS POLKADOT
La principale difficulté à laquelle Robonomics est confronté aujourd’hui est le prix élevé du lancement d’un dispositif IoT utilisant Ethereum. Sur Ethereum, vous devez payer une commission sur chaque transaction en termes de dollars américains, de l’ordre de 10 à 100 dollars. C’est assez cher pour la plupart des cas de l’économie réelle, qu’il s’agisse d’un voyage en covoiturage, de la location d’un appartement intelligent, de la livraison par drone ou de l’impression 3D de votre héros d’anime préféré sur commande.
Par souci d’équité, nous tenons à noter qu’il existe des scénarios rentables même avec des frais de transaction dans le réseau Ethereum de 2018 – 2019. Par exemple, les transactions automatisées de compensation de l’empreinte carbone ou le transfert de la commande du site Web directement à la production. Mais il n’en reste pas moins que pour l’application massive des technologies web3 dans le domaine de l’IoT, une réduction du prix que le cloud facture à l’appareil connecté est nécessaire.
En cherchant une opportunité de réduire le coût de l’interaction avec un dispositif IoT, les développeurs de Robonomics ont étudié les développements alternatifs à Ethereum. Leur choix s’est arrêté sur l’architecture Polkadot, qui leur permettrait d’exécuter leur propre blockchain, au sein d’un réseau commun, dans lequel la sécurité est assurée par des validateurs indépendants de notre projet.
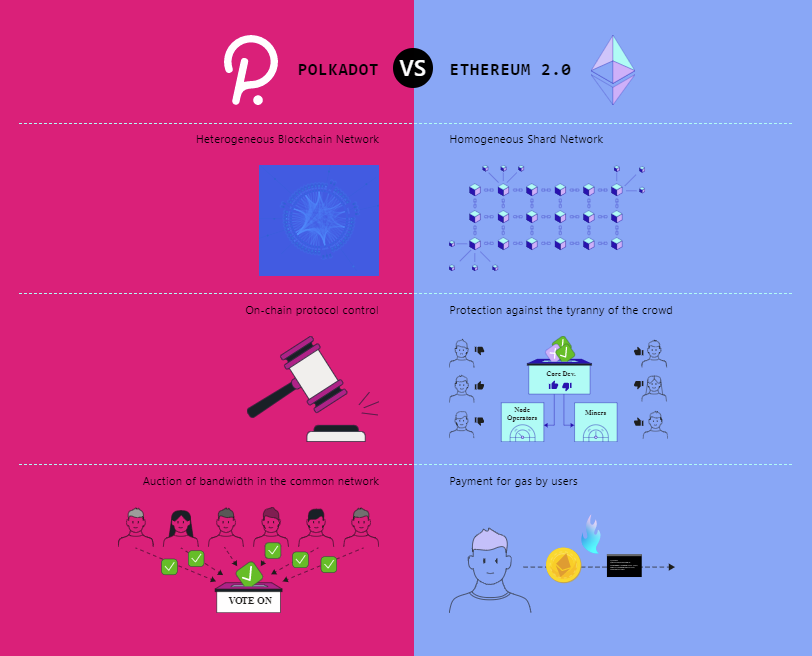
La parachain Kusama est une grande opportunité pour Robonomics de faire évoluer son réseau jusqu’à 1 million de systèmes IoT connectés en temps réel sans aucun régulateur centralisé.
L’équipe de développeurs de Robonomics a formé un plan pour 2 ans dans le cadre du créneau Kusama. Nous allons essayer de construire sur notre travail existant et le développement de nouveaux logiciels 5 fonctionnalités spécifiques, y compris :
-
LOCATION INTELLIGENTE
Récupérez votre investissement dans les robots à forte valeur ajoutée en les louant grâce à un mécanisme de symbolisation du travail des robots.
-
ROBOT EN TANT QUE SERVICE (RAAS)
Obtenez et fournissez des services robotiques directs sans caissiers, employés ou fournisseurs de nuages centralisés.
-
RWS
Les Services Web Robonomics (RWS) fourniront une infrastructure décentralisée pour les solutions IoT.
-
DAO IPCI
Le réseau Robonomics fournit une technologie pour le service d’atténuation environnementale DAO IPCI.
-
CLOUD DISTRIBUÉ
Technologies blockchain pour contrôler le trafic des drones (planification automatisée des trajectoires de vol des drones, réglementation décentralisée des paiements, contrat intelligent pour les transactions).
TRANSFORMATION EN CHAÎNE RELAY-CHAIN ROBONOMICS
La tâche finale pour les 48 semaines d’existence dans le réseau Kusama est la transformation de la parachain Robonomics en Robonomics Relay Chain. “C’est notre vision de l’avenir de Robonomics, en tant que segment complet de l’infrastructure Polkadot spécifiquement préparé pour travailler avec des dispositifs IoT.”
ARCHITECTURE
L’idée principale que les auteurs de Robonomics ont essayé de transmettre auparavant – est l’évolution naturelle, logique et apparemment inévitable du niveau actuel de l’économie vers des services entièrement automatisés. Les services automatisés devront avoir à la fois la capacité de parler le langage de l’économie humaine et l’économie propre des machines pour effectuer diverses opérations dans le monde qui les entoure à une vitesse que les humains ne peuvent pas atteindre.
APERÇU DE L’ÉTAT DE L’INTERNET DES OBJETS (IOT)
La question de l’accessibilité au réseau des dispositifs automatiques est discutée partout sur la planète depuis les années 60, et déjà à cette époque, des tentatives assez sérieuses ont été faites pour la résoudre. Par exemple, le cybernéticien soviétique Viktor Glushkov a proposé et partiellement mis en œuvre la collecte automatisée d’informations sur les volumes de production d’une usine individuelle dans le cadre de la conception du système d’information national OGAS dans les années 60 et 70. Il est largement connu que les distributeurs automatiques de Coca-Cola ont été connectés à l’ARPANET dans les années 1980 afin que les machines puissent signaler la disponibilité des boissons et leur température.
Pourtant, le développement réel de l’IoT a lieu aujourd’hui, grâce à l’utilisation généralisée de technologies habilitantes. Les principaux moteurs de l’évolution rapide des applications de l’internet des objets sont les résultats du développement de nombreux domaines, depuis les communications sans fil de différentes portées et les dispositifs embarqués jusqu’à l’analyse en nuage et l’apprentissage automatique. Le nombre de dispositifs IoT n’a cessé de croître au cours des dix dernières années (avec une prévision de 25 milliards d’unités d’ici 2030), ce qui a incité les chercheurs et les développeurs à créer de nouvelles applications IoT dans divers domaines tels que les soins de santé, la domotique, l’agroalimentaire, la protection de l’environnement.
Nous nous intéressons davantage au processus de construction des systèmes IoT et aux tâches qui en découlent. Au fil des années de recherche, de nombreuses architectures différentes ont été proposées, et en en faisant la moyenne, nous pouvons distinguer trois composants de base d’un système IoT : les dispositifs, l’infrastructure réseau, les machines d’analyse, de calcul et de contrôle.
Le développement et l’application de l’Internet des objets ont montré que la résolution de problèmes typiques ne suffit pas. Des concepts et principes totalement nouveaux, fondés sur des erreurs antérieures et des lacunes identifiées, sont apparus à l’heure actuelle. Cette approche certainement pratique de l’utilisation des services en nuage s’est avérée présenter un certain nombre de lacunes critiques liées à l’évolutivité, à la confidentialité et à la sécurité. Afin de résoudre ces problèmes, il a été proposé de rapprocher le traitement des données, la logique et le calcul du lieu immédiat où ils sont utilisés. C’est ainsi qu’ont émergé les concepts de fog et d’edge computing, des systèmes intermédiaires entre le cloud et les appareils prenant en charge certaines des fonctions du cloud. Par conséquent, la création de systèmes périphériques est devenue l’un des nouveaux défis de la construction de l’internet des objets.
Un autre défi récent pour la construction de l’IoT est le concept de jumeau numérique – une version numérique d’un équipement réel qui copie ses spécifications et ses données historiques. Ce concept est à son meilleur dans les domaines où il est nécessaire de disposer d’une spécification précise et complète d’un processus et de pouvoir prédire son évolution. L’internet des objets agit comme le principal intégrateur des jumeaux numériques, mais cette tâche est beaucoup plus profonde que la connectivité habituelle des appareils IoT.
Nous assistons actuellement à la naissance d’un segment entier du réseau, conçu et pratique non pas pour les personnes, mais pour les machines. L’internet des objets n’est plus seulement la mécanique de connexion d’un appareil au réseau, mais davantage de services, créés et disponibles spécifiquement pour les appareils. L’internet des objets ne se contente pas de connecter l’utilisateur et le dispositif, mais aide également les dispositifs à gérer les tâches consistant à fournir un service à la personne, mais de manière autonome.
CLASSIFICATION DES DISPOSITIFS IOT
SYSTÈMES IOT EMBARQUÉS
Ces systèmes n’ont pas d’interface utilisateur et sont généralement utilisés au niveau le plus bas des écosystèmes IoT pour fournir des fonctionnalités de base. Ils doivent être petits et économes en énergie. Ils disposent de ressources de calcul et de communication limitées. Les passerelles ou les contrôleurs IoT font généralement office de récepteurs de signaux.*
SYSTÈMES DE BORD : PASSERELLES ET CONTRÔLEURS IOT
Ces systèmes font office de lien entre les systèmes embarqués accessibles localement et l’Internet mondial. Ils prennent généralement en charge plusieurs protocoles de communication des systèmes embarqués et transfèrent la télémétrie des dispositifs vers le nuage et les signaux de commande vers l’arrière. Ces dispositifs sont souvent des versions plus sophistiquées du routeur WiFi, équipées d’un ordinateur monocarte pour effectuer le traitement primaire des informations provenant des dispositifs sans quitter le réseau local.

SYSTÈMES AUTONOMES
Cette classe comprend les automates complexes (tels que Spot de Boston Dynamics), dont le composant de commande est du niveau d’un ordinateur complet doté d’un processeur haute performance et d’une grande quantité de mémoire. Dans ce cas, le robot est connecté à internet sans solutions intermédiaires supplémentaires (edge-systems). Les logiciels nécessaires pour accéder à l’Internet des objets sont installés directement sur l’ordinateur du système autonome. Les données sont collectées et partiellement traitées localement, puis diffusées sur Internet comme n’importe quel périphérique réseau à part entière.
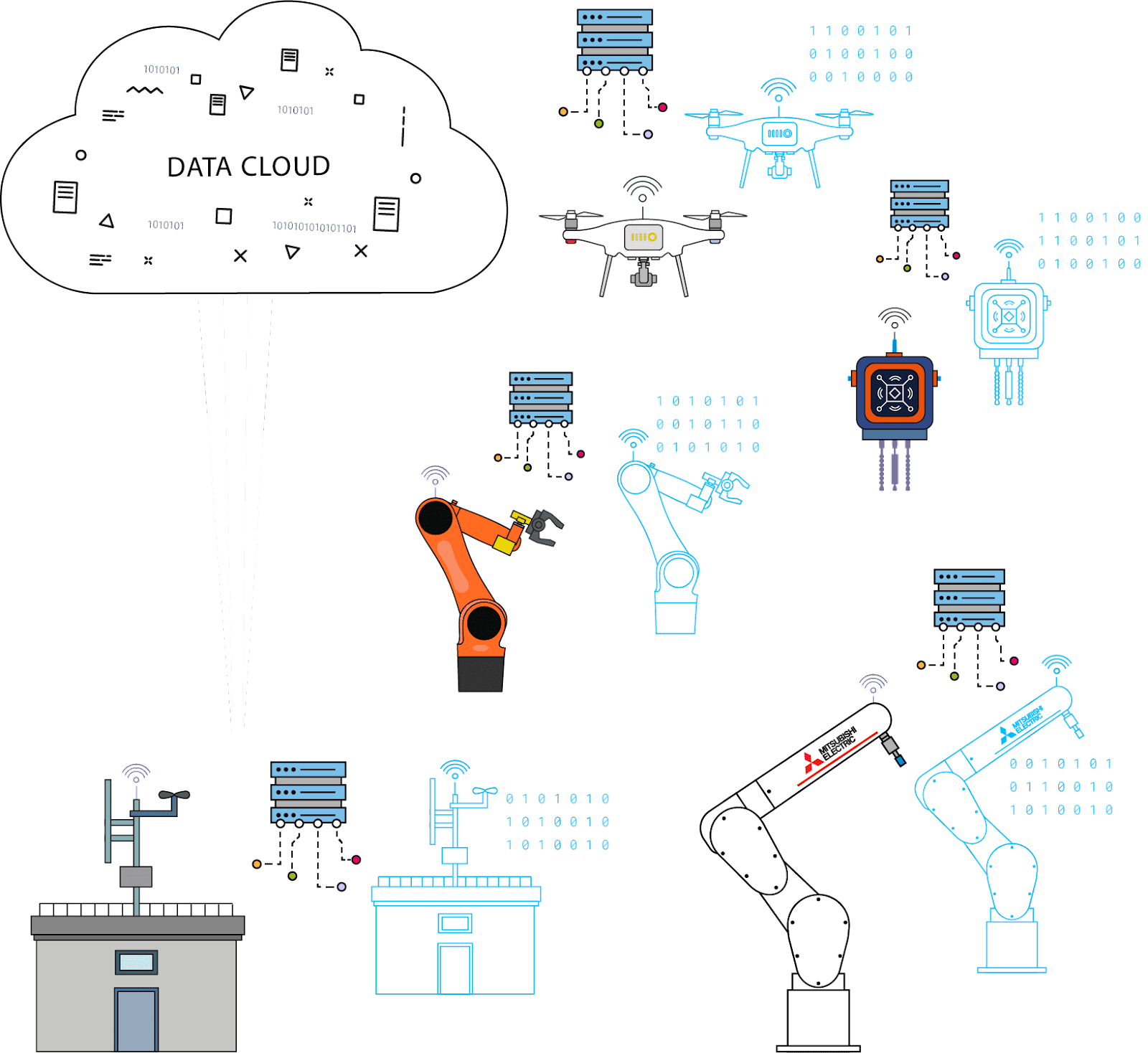
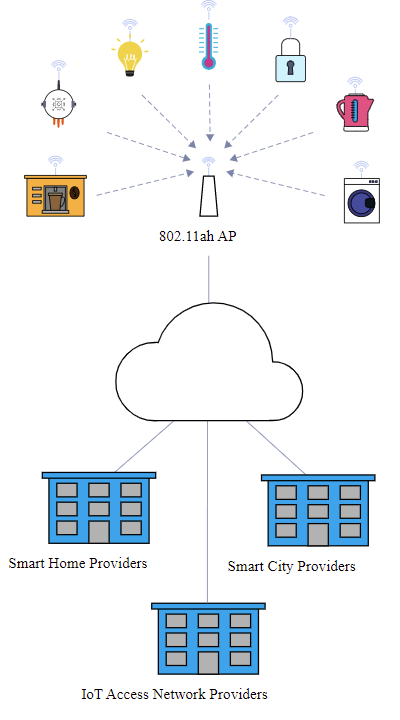
FOURNISSEURS D’INTERNET DES OBJETS
La principale mission des fournisseurs d’IoT consiste à fournir aux utilisateurs un accès à distance aux données et aux analyses, ainsi qu’à gérer les appareils intelligents via Internet. Les principaux critères de qualité du fournisseur sont la sécurité des opérations, la stabilité de la connexion et la disponibilité du fournisseur partout dans le monde.
Le schéma standard pour travailler avec un fournisseur IoT comprend : l’installation d’un logiciel sur un appareil intelligent compatible avec le cloud, la mise en place de services de gestion côté cloud après la première connexion réussie d’un appareil, la connexion de différents types de services analytiques.
LES JUMEAUX NUMÉRIQUES SONT AU CŒUR DE L’INTERNET DES OBJETS
En parlant de jumeaux numériques, il convient de noter que leur mise en œuvre est nécessaire d’un point de vue architectural, car il faut refuser de donner à l’utilisateur un accès direct au contrôle des appareils et à la modification de leur état. Les raisons les plus évidentes de ce refus sont, premièrement, la présence de leurs propres exigences et conditions dans les dispositifs juste avant le lancement. Deuxièmement, si plusieurs dispositifs d’utilisateurs doivent accéder à une seule source de données, il peut être essentiel de donner un contrôle personnalisé à chaque utilisateur. Enfin, il est extrêmement utile de garder à disposition le dernier état réel du dispositif au cas où il serait hors service.
En conséquence, nous avons une séparation de la boucle d’échange d’informations avec l’utilisateur et la génération effective de données réelles par les capteurs. Pour illustrer ce principe, voici le processus de l’utilisateur travaillant avec un dispositif IoT à l’aide d’un jumeau numérique.
UNE REPRÉSENTATION SIMPLE DE L’ARCHITECTURE ROBONOMIQUE
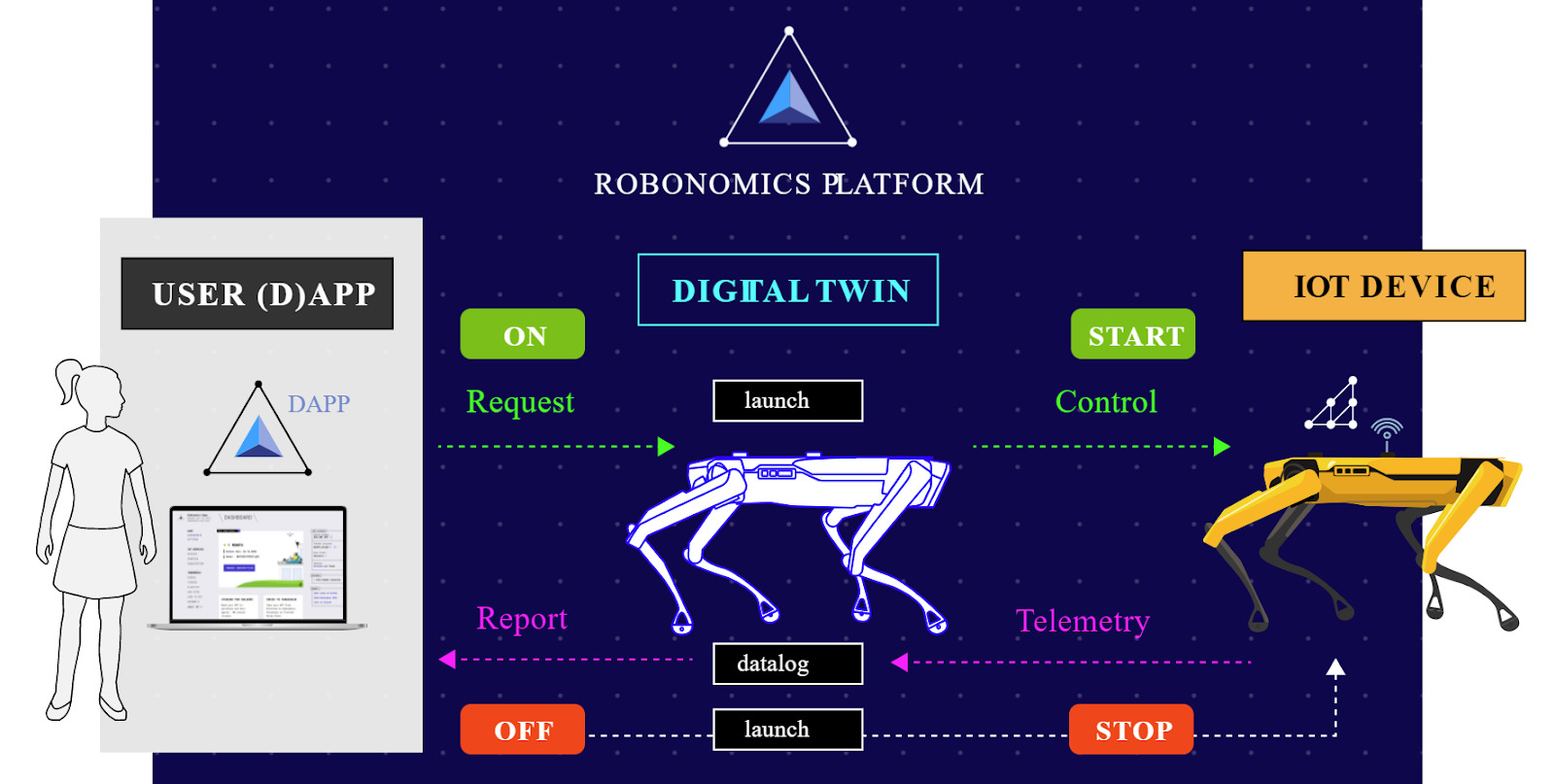
Voici un schéma général du cycle complet de démarrage d’un dispositif utilisant la plateforme Robonomics :
- L’application décentralisée de l’utilisateur envoie une requête pour une fonction de contrôle du dispositif à travers le réseau Robonomics.
- Le réseau Robonomics fournit la traduction de la demande en utilisant libp2p et capture les événements dans la blockchain Ethereum ou la parachain Robonomics.
- Le contrôle du dispositif est assuré par un réseau décentralisé, qui est garanti pour stocker les informations nécessaires au fonctionnement du dispositif IoT.
- Le dispositif IoT reçoit indépendamment des informations des réseaux Ethereum et Polkadot sur l’état actuel du jumeau numérique. Cela garantit que le dispositif ne peut être démarré en toute sécurité qu’après le règlement des paramètres techniques et économiques de démarrage.
- À la suite de l’opération, le dispositif IoT publie un journal des opérations terminées, qui peut être utilisé comme preuve du service fourni ou pour déboguer les erreurs.
- Le journal est transformé en un rapport pour l’utilisateur et devient disponible dans sa dapp.
COMPOSANTS DE BASE DE L’ARCHITECTURE ROBONOMIQUE
1 : L’INTERFACE HUMAINE
Nous proposons l’utilisation d’applications décentralisées (dapps) comme principal moyen de connecter les utilisateurs pour contrôler les appareils intelligents sur Internet. Ainsi, nous serons en mesure de fournir l’interface utilisateur la plus sûre (en termes de données) au système, qui sera capable de fonctionner simultanément dans les conditions du réseau local de la ville, et à travers un réseau mondial commun.
2 : LE PROTOCOLE DE COMMUNICATION
Son rôle est joué par le réseau Robonomics, une spécification développée par l’équipe du projet qui met en œuvre un réseau décentralisé de fournisseurs qui assurent la transmission, le traitement et le stockage des informations nécessaires au fonctionnement des dispositifs IoT. En fait, il s’agit d’une mise en œuvre d’un nœud spécifique à une fonction pour les réseaux IPFS, Ethereum et Polkadot.
3 : INTERFACE MACHINE
Nous avons choisi le framework robotique le plus connu appelé Robot Operating System Robot Operating System (ROS) comme interface standard pour intégrer tout système cyber-physique compatible. Robonomics permet plusieurs utilisations de ROS. L’implémentation de Robonomics pour le réseau Ethereum se présente sous la forme du paquet ROS robonomics_comm. Pour l’architecture ROS 2, nous implémentons le support de Robonomics en tant que couche middleware (voir « Robonomics as ROS 2 Middleware » pour plus de détails). Lorsque l’utilisation de ROS est redondante (par exemple, lorsque l’on travaille avec des dispositifs IoT), un module Python robonomics-interface a été développé. Il permet d’accéder aux fonctions de Robonomics de manière native et fonctionne aussi bien avec des nœuds locaux et privés qu’avec des nœuds distants et publics.
PROBLÈMES ACTUELS DE LA CONSTRUCTION DE SOLUTIONS IOT
DISPONIBILITÉ GLOBALE
L’architecture client-serveur standard nécessite de spécifier des points d’extrémité lors de l’acheminement des messages des dispositifs IoT. Ainsi, au cours de la vie d’un appareil intelligent, l’absence de connexion signifiera une limitation de la capacité à contrôler et à interagir avec l’appareil.
Par exemple, la guerre commerciale entre la Chine et les États-Unis est déjà une épée de Damoclès suspendue au-dessus de milliers de consommateurs d’appareils intelligents chinois aux États-Unis et vice versa. À tout moment, le blocage des serveurs de Xiaomi par les autorités américaines pourrait affecter les utilisateurs d’appareils qui se connectent aux services cloud du fabricant.
Se trouvant à proximité immédiate d’un appareil IoT, on ne peut pas le contrôler depuis une application mobile s’il n’y a pas de connexion aux serveurs, par lesquels sont assurées l’authentification de l’utilisateur et la collecte des télémétries des appareils eux-mêmes. En d’autres termes, l’appareil est en fait contrôlé par le cloud, et non par l’utilisateur.
CYBERSECURITÉ
La raison la plus importante de la faible cybersécurité de la plupart des solutions IoT découle de l’héritage problématique de l’architecture client-serveur du cloud. Par exemple, l’architecture de maison intelligente la plus courante à l’heure actuelle est généralement un hub IoT, connecté à un service en nuage. Ainsi, un système IoT typique est un élément de contrôle central connecté à de multiples systèmes externes. Certes, le service en nuage est plus sûr que les dispositifs de bas niveau, mais la consolidation du contrôle centralisé sur des centaines de milliers de ces systèmes fait de toute violation de sécurité et de toute fuite un désastre massif.
Les serveurs du service en nuage sont soumis à tous les problèmes de cybersécurité typiques : attaques de réseau, attaques DoS (conduisant le système à la défaillance), modifications malveillantes, détournement de session d’utilisateur, etc. Mais les menaces fortes comprennent également des problèmes non intentionnels tels que des erreurs de conception, une mauvaise utilisation ou des catastrophes naturelles qui entraînent la défaillance des serveurs. Un autre point tout aussi important est la nécessité, en principe, de faire confiance au cloud et aux personnes qui en assurent la maintenance.
Tout ceci est exacerbé par l’échelle des solutions IoT. Le nombre de dispositifs IoT appartenant à un même système peut dépasser des centaines ou des milliers, et en même temps, de par leur nature, les dispositifs IoT ont moins de puissance de calcul, ce qui rend beaucoup plus difficile le déploiement de pare-feu et d’anti-virus pour eux. Malheureusement, le facteur le plus pernicieux est le fait que les dispositifs IoT sont des CPS en fonctionnement, de sorte que les menaces pour la cybersécurité se manifestent au niveau physique.
CONFIDENTIALITÉ DES DONNÉES
Le point relatif à la confidentialité doit être séparé de la cybersécurité, car ce problème est spécifique aux systèmes IoT. En raison du grand nombre et de la variété des types de dispositifs qui sont beaucoup plus intégrés dans le monde physique que les seuls ordinateurs et smartphones, l’éventail des types de données privées est multiplié. Il ne s’agit plus seulement de la localisation GPS, des relevés d’achats, des transactions financières et des photos, mais aussi d’un enregistrement permanent des vidéos et des conversations, des empreintes vocales, de l’état de santé et même de la liste des habitudes d’une personne. Parmi les types de menaces liées à la vie privée, on peut citer :
Le plus effrayant est que les utilisateurs n’ont pas ou peu conscience qu’ils renoncent à leur vie privée, car ils n’ont pratiquement aucune idée des données collectées et de la manière dont elles sont utilisées. C’est précisément pour cette raison que la menace pour la vie privée augmente non seulement du fait des intrus, mais aussi des organisations et des agences gouvernementales. Les services IoT en nuage exigent généralement un transfert de données maximal de la part des appareils, et il n’existe aucun moyen d’interdire ou de limiter le transfert de données (« Acceptez les conditions ou cassez-vous »). En outre, bien que les données collectées soient un actif et aient une valeur réelle, la personne auprès de laquelle elles sont collectées se voit non seulement refuser le droit de disposer activement de ces données, mais aussi de recevoir une compensation pour la collecte de ses propres données.
EXEMPLES POPULAIRES DE SOLUTIONS IoT
- Un système typique de maison intelligente offre un large éventail d’options pour contrôler votre espace de vie. Avec son aide, vous pouvez contrôler à distance les serrures des portes, en configurant un accès ponctuel ou régulier à la pièce pour la famille et les amis, ainsi que pour le personnel d’entretien ou de livraison. Grâce à de nombreux capteurs et dispositifs d’enregistrement, le système est capable d’inclure un enregistrement vidéo lors du déclenchement de capteurs de mouvement, de prendre de manière autonome la décision de couper l’alimentation en eau lorsqu’une fuite est détectée dans le réseau d’eau, de démarrer un aspirateur robot programmé, fournissant un rapport de nettoyage à l’application utilisateur, de changer la température de la pièce à la valeur optimale en fonction de votre programme.
- Les voitures intelligentes. En fournissant à l’électronique embarquée de la voiture un accès à l’internet mobile, l’utilisateur peut commander à distance diverses fonctions de la voiture directement depuis son smartphone : ouverture des portes, mise en marche du climatiseur, contrôle des phares. Si ces voitures sont utilisées pour l’autopartage, vous pouvez créer une carte interactive de l’emplacement des voitures avec leur statut, le carburant restant, etc. pour les clients de ce service.
- Système intelligent de location d’équipements. L’entreprise installe des manipulateurs robotisés sur la ligne de convoyage dans le cadre d’un contrat avec paiement au nombre d’opérations ou au temps du robot. Les manipulateurs fournissent régulièrement un journal des opérations effectuées, des erreurs et des avertissements. Les frais de location du robot sont calculés sur cette base, ainsi que la maintenance prédictive des robots par le fournisseur.
APP STORE POUR LA ROBOTIQUE – ROBONOMICS MARKETPLACE
Les entreprises qui conçoivent et fabriquent des produits et des équipements connectés à l’IdO devraient adopter un modèle flexible de fourniture de jumeaux numériques pour réduire les obstacles à l’adoption, par exemple en proposant des jumeaux numériques via des places de marché, plutôt que de proposer uniquement des jumeaux numériques via leur propre modèle de fourniture propriétaire.
Le modèle de jumeau numérique développé peut être directement lié aux services supplémentaires que votre entreprise fournit au secteur de l’IdO.
Pour rendre un processus de livraison pratique et simple pour des centaines de clients, nous avons ajouté une section de la place de marché des services pour robots. Jetez un coup d’œil aux premiers exemples des offres groupées mises en œuvre du modèle de jumeau numérique + service automatisé de l’entreprise.
Avez-vous une idée pour votre service pour les robots ou les utilisateurs ? Alors passez aux instructions étape par étape pour construire votre application IoT sur la plateforme Robonomics.
https://dapp.robonomics.network/#/services
Pour s’amuser: NFTs et astronomie (Téléscope dans le désert d’ATACAMA)
https://telescope.merklebot.com/
https://robonomics.network/blog/online-winter-school-2022-lesson-telescope/
TOKENOMICS
ETHEREUM ECOSYSTEM
XRT est disponible comme token ERC-20:
0x7de91b204c1c737bcee6f000aaa6569cf7061cb7
POLKADOT ECOSYSTEM
XRT est disponible comme token Substrate : https://robonomics.subscan.io/
Tradable sur Huobi et Kraken.
Les 3 principaux cas d’usage:
1. Acheter des abonnements IoT
Lancement des services Web Robonomics. Ce modèle d’abonnement durable pour les appareils IoT rend possible l’exécution de transactions à poids zéro dans la blockchain.
2. Trade
Vous pouvez acheter et vendre XRT en tant que jeton ERC-20. Les boutons ci-dessous vous conduiront vers les DEXs (Decentralized Exchanges) correspondants. Veuillez toujours vérifier l’adresse du contrat du jeton lorsque vous achetez sur un DEX.
3. Staking
Veuillez noter que le staking est uniquement disponible pour le jeton XRT natif de parachain:
https://dapp.robonomics.network/#/staking/
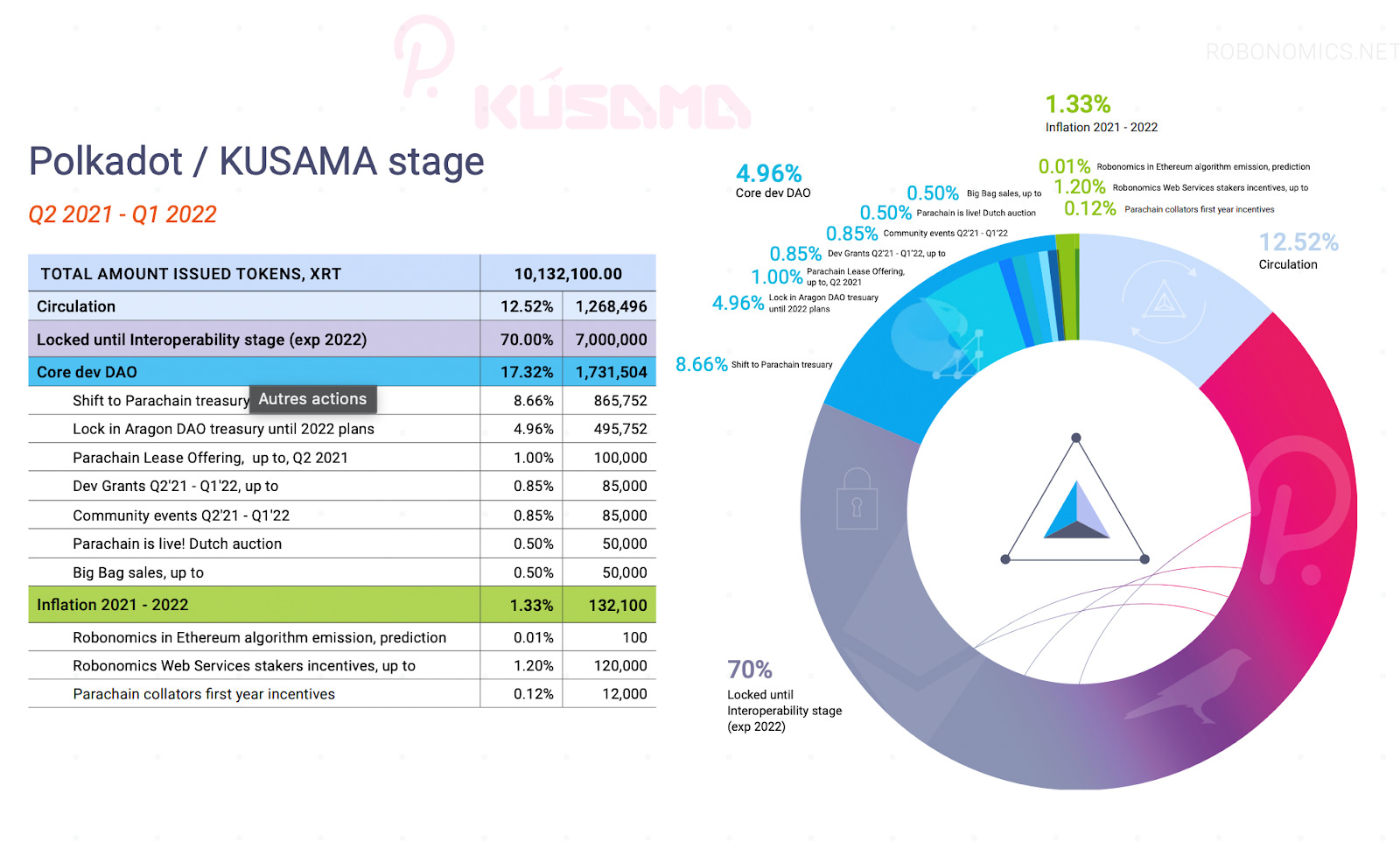
DISTRIBUTION DE JETONS
Robonomics est un projet qui se développe de manière dynamique et qui ne s’arrête pas. La distribution des jetons varie en fonction du stade de développement du projet. les prochains changements sont prévus en 2022.
Actuellement:
Dans un futur proche:

POUR APPROFONDIR ET SOURCES DE LECTURE
Sources diverses:
Whitepaper: https://static.robonomics.network/docs/whitepaper/Robonomics-whitepaper-en.pdf
Github: https://github.com/airalab
Wiki: https://wiki.robonomics.network/en/
Discord: https://discord.gg/JpaN2XAmqY
Twitter: https://twitter.com/AIRA_Robonomics
Blog: https://robonomics.network/blog/
Technique:
Pour la commodité des développeurs, Robonomics contient un ensemble de logiciels pour la connexion : des dispositifs IoT à l’aide du protocole HTTP/MQTT, des systèmes robotiques complexes à l’aide du système d’exploitation pour robots (ROS).
Connexion de capteurs au réseau Robonomics: https://wiki.robonomics.network/docs/en/connect-sensor-to-robonomics/
Interaction avec le réseau Robonomics: https://wiki.robonomics.network/docs/en/rio-overview/
Connexion homme-machine avec l’OS AIRA: https://wiki.robonomics.network/docs/en/aira-overview/
Robonomics prend déjà en charge des centaines de robot dès l’ouverture de la boîte:
Les utilisateurs de la plateforme peuvent connecter des robots compatibles avec ROS à l’économie numérique en quelques minutes. Pour une liste complète des robots pris en charge, veuillez suivre le lien suivant : https://robots.ros.org/
QUESTIONS OUVERTES DE THÉOLOGIE
Une question extrêmement populaire qui reste encore ouverte est celle de la finalité des robots lorsqu’ils fournissent des services aux personnes. Il s’agit d’une question spécifique mais importante sur le plan académique. Le fait est que l’économie humaine inclut souvent des facteurs liés à l’exécution de bonne foi des tâches prévues dans un contrat, au désir des parties d’atteindre un résultat, ainsi qu’au comportement opportuniste et altruiste de l’individu dans la société. Il est difficile de parler de ces questions en robotique aujourd’hui, c’est pourquoi les développeurs de Robonomics aimeraient laisser les questions téléologiques ouvertes pour une étude ultérieure, et concentrer leur attention sur la partie praxéologique du comportement des robots en tant qu’agents économiques. En ce qui concerne la fixation d’objectifs, un article ancien de Norbert Wiener et de ses collègues intitulé « Behavior, Purpose and Teleology », ainsi que les travaux de l’économiste et philosophe américain Ludwig von Mises sur l’activité humaine peuvent être considérés comme des points de référence.
Mises, dans son livre « Human Action : A Treatise of Economics », Mises aborde l’être humain en économie sous l’angle de la praxéologie. La praxéologie nous donne un aperçu intéressant du comportement humain sans corrélation directe avec le but ultime. En continuant à étudier les phénomènes de l’économie humaine du point de vue des processus eux-mêmes, séparés des objectifs finaux, nous pouvons mieux comprendre le cadre qui peut être formé pour une économie robotique, afin de ne pas plonger dans les questions de téléologie des machines.
Quelques pistes de lecture
Les grands livres mènent à de grandes idées. Si vous cherchez plus d’inspiration sur la communication homme-machine, essayez de lire des livres de science-fiction. Marquez les livres que vous avez déjà lus et voyez ce que nous pouvons encore vous proposer pour une réflexion plus approfondie.
Les Androides rêvent-ils de robots électriques – Philip K. Dick
Autofac – Philip K. Dick
I, Robot – Isaac Asimov
L’homme bicentenaire – Isaac Asimov
Neuromancer – WIlliam Gibson
Marionnettes, Inc – Ray Bradbury

{kind=link}